501
Q921280
Analise a figura a seguir:
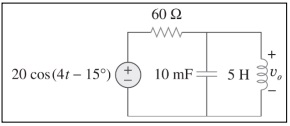
A impedância equivalente do circuito anterior é de, aproximadamente:
A impedância equivalente do circuito anterior é de, aproximadamente: