21
Q930371
A figura abaixo apresenta um robô definido no espaço plano com cadeia cinemática do tipo RRP, sendo que R representa uma junta de revolução e P representa uma junta do tipo prismática.
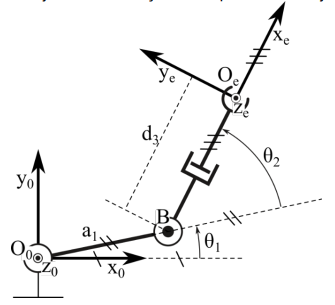
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo ?1, medido entre o eixo x0 e a reta definida pelos pon...
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo ?1, medido entre o eixo x0 e a reta definida pelos pon...