Considere um circuito em corrente contínua com uma fonte de tensão (V) em série com uma resistência constante (R) e uma resistência variável (RL), chamada de “carga”. Qual deve ser a relação entre as resistências para que a maior potência possível (pmax) seja transferida para a carga e qual é o valor dessa potência em função da tensão da fonte V e da resistência da carga RL?
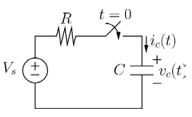
Considere o circuito apresentado na figura a seguir, em que VS é a tensão da fonte e vc(t) é a tensão no capacitor. Suponha que o capacitor esteja completamente descarregado em t = 0. As equações que descrevem o comportamento da tensão vc(t) e a corrente ic(t) no capacitor para t > 0 são dadas por:
Em relação a elementos de circuito passivos, analise as afirmativas a seguir e assinale a alternativa correta. I. A equação do capacitor é dada por i= C dv/dt, em que C é a capacitância, cuja unidade de medida é o farad (F). II. A equação do indutor é dada por v = L di/dt, em que L é a indutância, cuja unidade de medida é o henry (H). III. A capacitância equivalente, Ceq, de dois capacitores em conectados em série, C1 e C2, é dada por Ceq= C1 + C2. IV. Capacitores são usados para armazenar energia na forma de campo elétrico, enquanto indutores podem armazenar energia na forma de campo magnético. V. A energia armazenada em um capacitor é dada por wC = 1/2 Cv2 e a energia armazenada por um indutor é dada por wL = 1/2 Li2.
Em relação a circuitos elétricos trifásicos, analise as afirmativas a seguir e assinale a alternativa correta. I. Apenas dois wattímetros são necessários para medir a potência média total absorvida por uma carga trifásica. II. A sequência de fase é a ordem em que as tensões das fases de um gerador trifásico ocorrem em relação ao tempo. Em uma sequência abc de tensões balanceadas de um gerador trifásico, a tensão da fase A está adiantada 120 graus da tensão da fase B, que, por sua vez, está 120 graus adiantada da tensão da fase C. III. Em um sistema trifásico, tanto a fonte quanto a carga podem ser conectadas em triângulo ou em estrela. IV. Tensões de fase balanceadas são iguais em amplitude e fora de fase uma das outras em 120 graus.
Com o objetivo de determinar a potência de uma carga monofásica, os valores de tensão e corrente eficazes foram medidos, obtendo-se 220 V e 30 A, respectivamente. Sabendo-se que o fator de potência da carga é 0,9 indutivo, a potência ativa dissipada pela carga é dada por:
A corrente no secundário de um transformador ideal de 13.200/220 V é de 30 A. A razão de espiras do transformador, a potência aparente que está sendo transmitida e a corrente no primário são dadas por: