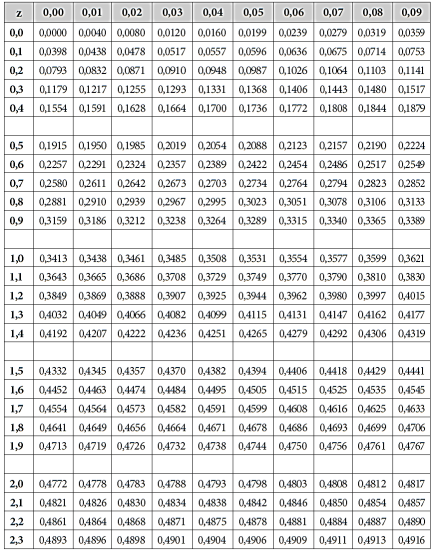
Para resolução da questão, considere a parte da tabela de distribuição normal padrão, dada a seguir. ÁREAS OU PROBABILIDADES SOB A CURVA NORMAL PADRÃO ENTRE Z = 0,00 E UM VALOR POSITIVO DE Z PARA OS VALORES DAS PROBABILIDADES ENTRE OS VALORES NEGATIVOS DE Z E Z = 0,00, AS ÁREAS SÃO OBTIDAS POR SIMETRIA
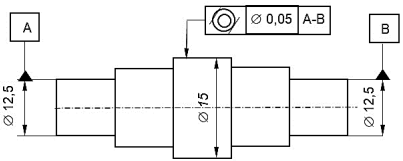
Suponha que o diâmetro de uma peça de tipo eixo (D) foi medido com paquímetro digital com resolução de 0,01 mm e faixa nominal de 150 mm. Os valores de diâmetro obtidos durante a medição seguem uma distribuição normal de probabilidades com média (µ) igual a 100,00 mm e variância (IMAGEM ) igual a 0,04 mm² . Ao se selec...
Um fornecedor de aços para a indústria de óleo e gás garante que a dureza média do aço AISI 4140 é 40 HRC. Os valores de dureza se distribuem normalmente com variância 2 HRC2 . Um cliente realiza medições de dureza em 10 amostras, obtendo resultados expressos em HRC.42, 39, 43, 42, 40, 40, 44, 41, 42 e 43. Marque a alternativa que apresenta o teste de hipótese que deve ser utilizado e as hipóteses que devem ser formuladas para aceitar ou rejeitar a afirmação do fornecedor de aços, de que a dureza média do aço AISI 4140 por ele fornecido é 40 HRC, com nível de confiança de 95 %.
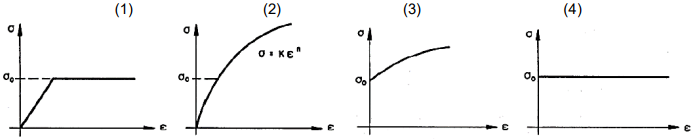
Curva de escoamento, na teoria da plasticidade, tem necessidade de ser idealizada. Assim se distinguem os corpos de comportamento mais geral, conforme apresentado nas curvas de Tensão x Deformação:
Marque a alternativa que apresenta a ordem correta para os possíveis comportamentos teóricos apresentados acima.
O Aço Hardfield, um aço-manganês austenítico, inventado por Sir Robert Abbott Hardfield em 1882, caracteriza-se por possuir elevados índices de carbono (C) (0,7 – 1,45%) e de manganês (Mn) (11 – 15%), podendo ainda apresentar adição de cromo, cobre e níquel. Possui elevada dureza e resistência ao desgaste, sendo indicado para aplicações bem específicas, como fabricação de mandíbulas de britadores. A elevada dureza desses aços se deve à austenita ser pouco estável e ao fato de eles, em condições onde ocorra encruamento, quando colocados em serviço, poderem ser tornados martensíticos (martensita induzida). Um jovem engenheiro, ao tomar conhecimento desse tipo de aço, convenceu a empresa na qual trabalha a reforçar as pás das retroescavadeiras com grossas lâminas de aço Hardfield. Para ...
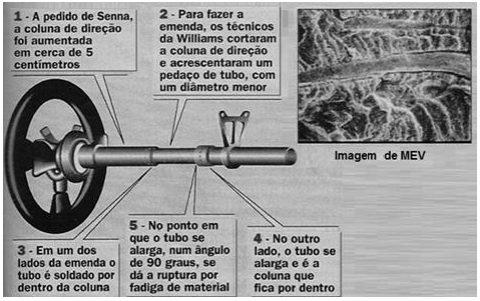
Em 1º de Maio de 1994, um acidente tirou a vida do piloto brasileiro Ayrton Senna, no GP de Imola daquele ano. O carro de Senna passou reto na curva Tamburello e acabou se chocando violentamente contra a mureta de concreto. Embora ainda existam algumas teorias absurdas para a causa do acidente, a perícia conseguiu desvendar a verdadeira causa do acidente, conforme apresentado no quadro abaixo, com a imagem de MEV (Microscópio Eletrônico de Varredura) da região fraturada da coluna da direção.
FONTE: “Remendo Fatal”. Revista Veja, Ano 28, n° 18, p. 90-97, Abril, 1995. Baseando-se nas informações acima, é correto afirmar que ...
Engenharia Mecânica
Manutenção Mecânica
Tipos (corretiva, preventiva, preditiva e detectiva)
Ano:
2023
Banca:
VUNESP
As organizações devem escolher o tipo mais conveniente de manutenção para um determinado equipamento, instalação ou sistema. Dentre os tipos de manutenção, a preventiva
Seja a esfera sólida Æ {(x ? 1)2 + (y ? 2)2 + (z ? 3)2 ? 25 e o plano ?{3x + 4y + 9 = 0, Alternativas A o centro da esfera está contido no plano, então o raio do círculo resultante da intersecção é 5. B o plano é tangente à esfera. A intersecção é um ponto. C não há intersecção entre o plano e a esfera. D a intersecção do plano com a esfera resultará em um círculo de área 9?. E a intersecção do plano com a esfera resultará em uma circunferência de raio 3. Responder Você errou! Resposta: